![]()
QMRI Challenge ISMRM 2024 - \(T_1\) mapping
In the 2024 ISMRM QMRI Challenge, the goal is to estimate \(T_1\) maps from a set of inversion recovery images. The dataset consists of images obtained at 10 different inversion times using a turbo spin echo sequence. Each inversion time is saved in a separate DICOM file. In order to obtain a \(T_1\) map, we are going to:
download the data from Zenodo
read in the DICOM files (one for each inversion time) and combine them in an IData object
define a signal model and data loss (mean-squared error) function
find good starting values for each pixel
carry out a fit using ADAM from PyTorch
Get data from Zenodo
import tempfile
import zipfile
from pathlib import Path
import zenodo_get
dataset = '10868350'
tmp = tempfile.TemporaryDirectory() # RAII, automatically cleaned up
data_folder = Path(tmp.name)
zenodo_get.zenodo_get([dataset, '-r', 5, '-o', data_folder]) # r: retries
with zipfile.ZipFile(data_folder / Path('T1 IR.zip'), 'r') as zip_ref:
zip_ref.extractall(data_folder)
Create image data (IData) object with different inversion times
We read in the DICOM files and combine them in an IData object.
The inversion times are stored in the DICOM files are available in the header of the IData object.
import mrpro
ti_dicom_files = data_folder.glob('**/*.dcm')
idata_multi_ti = mrpro.data.IData.from_dicom_files(ti_dicom_files)
if idata_multi_ti.header.ti is None:
raise ValueError('Inversion times need to be defined in the DICOM files.')
Show plotting details
import matplotlib.pyplot as plt
import torch
def show_images(*images: torch.Tensor, titles: list[str] | None = None) -> None:
"""Plot images."""
n_images = len(images)
_, axes = plt.subplots(1, n_images, squeeze=False, figsize=(n_images * 3, 3))
for i in range(n_images):
axes[0][i].imshow(images[i], cmap='gray')
axes[0][i].axis('off')
if titles:
axes[0][i].set_title(titles[i])
plt.show()
# Let's have a look at some of the images
show_images(
*idata_multi_ti.data[:, 0, 0].abs(),
titles=[f'TI = {ti:.3f}s' for ti in idata_multi_ti.header.ti],
)

Signal model and loss function
We use the model \(q\)
\(q(TI) = M_0 (1 - e^{-TI/T_1})\)
with the equilibrium magnetization \(M_0\), the inversion time \(TI\), and \(T_1\). We have to keep in mind that the DICOM images only contain the magnitude of the signal. Therefore, we need \(|q(TI)|\):
model = mrpro.operators.MagnitudeOp() @ mrpro.operators.models.InversionRecovery(ti=idata_multi_ti.header.ti)
As a loss function for the optimizer, we calculate the mean-squared error between the image data \(x\) and our signal model \(q\).
mse = mrpro.operators.functionals.MSE(idata_multi_ti.data.abs())
Now we can simply combine the two into a functional to solve
\( \min_{M_0, T_1} \big| |q(M_0, T_1, TI)| - x\big|_2^2\)
functional = mse @ model
Starting values for the fit
We are trying to minimize a non-linear function \(q\). There is no guarantee that we reach the global minimum, but we can end up in a local minimum.
To increase our chances of reaching the global minimum, we can ensure that our starting values are already close to the global minimum. We need a good starting point for each pixel.
One option to get a good starting point is to calculate the signal curves for a range of \(T_1\) values and then check for each pixel which of these signal curves fits best. This is similar to what is done for MR Fingerprinting. So we are going to:
define a list of realistic \(T_1\) values (we call this a dictionary of \(T_1\) values)
calculate the signal curves corresponding to each of these \(T_1\) values
compare the signal curves to the signals of each voxel (we use the maximum of the dot-product as a metric of how well the signals fit to each other)
use the \(T_1\) value with the best fit as a starting value for the fit. Use the scaling factor of the best fit for the \(M_0\) value.
This is implemented in the DictionaryMatchOp operator.
# Define 100 T1 values between 0.1 and 3.0 s
t1_values = torch.linspace(0.1, 3.0, 100)
# Create the dictionary. We set M0 to constant 1, as the scaling is handled by the dictionary matching operator.
dictionary = mrpro.operators.DictionaryMatchOp(model, 0).append(torch.ones(1), t1_values)
# Select the closest values in the dictionary for each voxel based on cosine similarity
m0_start, t1_start = dictionary(idata_multi_ti.data.real)
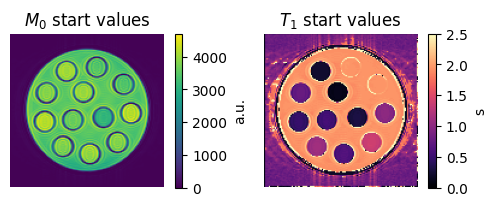
Visualize the starting values
Let’s have a look at the starting values for \(M_0\) and \(T_1\):
fig, axes = plt.subplots(1, 2, figsize=(6, 2), squeeze=False)
im = axes[0, 0].imshow(m0_start[0, 0])
axes[0, 0].set_title('$M_0$ start values')
axes[0, 0].set_axis_off()
fig.colorbar(im, ax=axes[0, 0], label='a.u.')
im = axes[0, 1].imshow(t1_start[0, 0], vmin=0, vmax=2.5, cmap='magma')
axes[0, 1].set_title('$T_1$ start values')
axes[0, 1].set_axis_off()
fig.colorbar(im, ax=axes[0, 1], label='s')
plt.show()
Carry out fit
We are now ready to carry out the fit. We are going to use the adam optimizer.
If there is a GPU available, we can use it by moving both the data and the model to the GPU.
# Move initial values and model to GPU if available
if torch.cuda.is_available():
print('Using GPU')
functional.cuda()
m0_start = m0_start.cuda()
t1_start = t1_start.cuda()
# Hyperparameters for optimizer
max_iterations = 2000
learning_rate = 1e-1
# Run optimization
result = mrpro.algorithms.optimizers.adam(
functional, [m0_start, t1_start], max_iterations=max_iterations, learning_rate=learning_rate
)
m0, t1 = (p.detach().cpu() for p in result)
model.cpu()
OperatorComposition(
(_operator1): MagnitudeOp()
(_operator2): InversionRecovery()
)
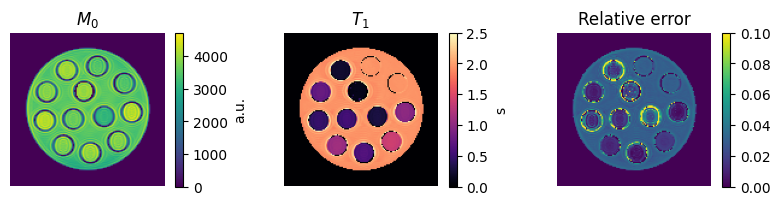
Visualize the final results
To get an impression of how well the fit has worked, we are going to calculate the relative error between
\(E_\text{relative} = \sum_{TI}\frac{|(q(M_0, T_1, TI) - x)|}{|x|}\)
on a voxel-by-voxel basis We also mask out the background by thresholding on \(M_0\).
error = model(m0, t1)[0] - idata_multi_ti.data
relative_absolute_error = error.abs().sum(dim=0) / (idata_multi_ti.data.abs().sum(dim=0) + 1e-9)
mask = torch.isnan(t1) | (m0 < 500)
m0[mask] = 0
t1[mask] = 0
relative_absolute_error[mask] = 0
fig, axes = plt.subplots(1, 3, figsize=(10, 2), squeeze=False)
im = axes[0, 0].imshow(m0[0, 0])
axes[0, 0].set_title('$M_0$')
axes[0, 0].set_axis_off()
fig.colorbar(im, ax=axes[0, 0], label='a.u.')
im = axes[0, 1].imshow(t1[0, 0], vmin=0, vmax=2.5, cmap='magma')
axes[0, 1].set_title('$T_1$')
axes[0, 1].set_axis_off()
fig.colorbar(im, ax=axes[0, 1], label='s')
im = axes[0, 2].imshow(relative_absolute_error[0, 0], vmin=0, vmax=0.1)
axes[0, 2].set_title('Relative error')
axes[0, 2].set_axis_off()
fig.colorbar(im, ax=axes[0, 2])
plt.show()
Next steps
The 2024 ISMRM QMRI Challenge also included the estimation of \(T_2^*\) maps from multi-echo data. You can find the
the data on zenodo in record 10868361 as T2star.zip
You can download and unpack it using the same method as above.
As a signal model \(q\) you can use MonoExponentialDecay describing the signal decay
as \(q(TE) = M_0 e^{-TE/T_2^*}\) with the equilibrium magnetization \(M_0\), the echo time \(TE\), and \(T_2^*\).
Give it a try and see if you can obtain good \(T_2^*\) maps!
Note
The echo times \(TE\) can be found in IData.header.te. As starting values, either dictionary matching, or
the signal at the shortest echo time for \(M_0\) and 20 ms for \(T_2^*\) can be used.