![]()
Regularized iterative SENSE reconstruction of 2D golden angle radial data
Here we use the RegularizedIterativeSENSEReconstruction class to reconstruct
undersampled images from 2D radial data.
Show download details
# Download raw data from Zenodo
import tempfile
from pathlib import Path
import zenodo_get
dataset = '14617082'
tmp = tempfile.TemporaryDirectory() # RAII, automatically cleaned up
data_folder = Path(tmp.name)
zenodo_get.zenodo_get([dataset, '-r', 5, '-o', data_folder]) # r: retries
Image reconstruction
We use the RegularizedIterativeSENSEReconstruction class to reconstruct images
from 2D radial data. It solves the following reconstruction problem:
Let’s assume we have obtained the k-space data \(y\) from an image \(x\) with an acquisition model (Fourier transforms, coil sensitivity maps…) \(A\) then we can formulate the forward problem as:
\( y = Ax + n \)
where \(n\) describes complex Gaussian noise. The image \(x\) can be obtained by minimizing the functionl \(F\)
\( F(x) = ||W^{\frac{1}{2}}(Ax - y)||_2^2 \)
where \(W^\frac{1}{2}\) is the square root of the density compensation function (which corresponds to a diagonal operator). Because this is an ill-posed problem, we can add a regularization term to stabilize the problem and obtain a solution with certain properties:
\( F(x) = ||W^{\frac{1}{2}}(Ax - y)||_2^2 + l||Bx - x_{reg}||_2^2\)
where \(l\) is the strength of the regularization, \(B\) is a linear operator and \(x_{reg}\) is a regularization image. With this functional \(F\) we obtain a solution which is close to \(x_{reg}\) and to the acquired data \(y\).
Setting the derivative of the functional \(F\) to zero and rearranging yields
\( (A^H W A + l B) x = A^H W y + l x_{reg}\)
which is a linear system \(Hx = b\) that needs to be solved for \(x\).
One important question of course is, what to use for \(x_{reg}\). For dynamic images (e.g. cine MRI) low-resolution dynamic images or high-quality static images have been proposed. In recent years, also the output of neural-networks has been used as an image regulariser.
In this example we are going to use a high-quality image to regularize the reconstruction of an undersampled image. Both images are obtained from the same data acquisition (one using all the acquired data (\(x_{reg}\)) and one using only parts of it (\(x\))). This of course is an unrealistic case but it will allow us to study the effect of the regularization.
Reading of both fully sampled and undersampled data
We read the raw data and the trajectory from the ISMRMRD file. We load both, the fully sampled and the undersampled data. The fully sampled data will be used to estimate the coil sensitivity maps and as a regularization image. The undersampled data will be used to reconstruct the image.
# Read the raw data and the trajectory from ISMRMRD file
import mrpro
kdata_fullysampled = mrpro.data.KData.from_file(
data_folder / 'radial2D_402spokes_golden_angle_with_traj.h5',
mrpro.data.traj_calculators.KTrajectoryIsmrmrd(),
)
kdata_undersampled = mrpro.data.KData.from_file(
data_folder / 'radial2D_24spokes_golden_angle_with_traj.h5',
mrpro.data.traj_calculators.KTrajectoryIsmrmrd(),
)
Image \(x_{reg}\) from fully sampled data
We first reconstruct the fully sampled image to use it as a regularization image. In a real-world scenario, we would not have this image and would have to use a low-resolution image as a prior, or use a neural network to estimate the regularization image.
# Estimate coil maps. Here we use the fully sampled data to estimate the coil sensitivity maps.
# In a real-world scenario, we would either a calibration scan (e.g. a separate fully sampled scan) to estimate the coil
# sensitivity maps or use ESPIRiT or similar methods to estimate the coil sensitivity maps from the undersampled data.
direct_reconstruction = mrpro.algorithms.reconstruction.DirectReconstruction(kdata_fullysampled)
csm = direct_reconstruction.csm
assert csm is not None
# unregularized iterative SENSE reconstruction of the fully sampled data
iterative_sense_reconstruction = mrpro.algorithms.reconstruction.IterativeSENSEReconstruction(
kdata_fullysampled, csm=csm, n_iterations=3
)
img_iterative_sense = iterative_sense_reconstruction(kdata_fullysampled)
Image \(x\) from undersampled data
We now reconstruct the undersampled image using the fully sampled image first without regularization, and with with an regularization image.
# Unregularized iterative SENSE reconstruction of the undersampled data
iterative_sense_reconstruction = mrpro.algorithms.reconstruction.IterativeSENSEReconstruction(
kdata_undersampled, csm=csm, n_iterations=6
)
img_us_iterative_sense = iterative_sense_reconstruction(kdata_undersampled)
# Regularized iterativ SENSE reconstruction of the undersampled data
regularized_iterative_sense_reconstruction = mrpro.algorithms.reconstruction.RegularizedIterativeSENSEReconstruction(
kdata_undersampled,
csm=csm,
n_iterations=6,
regularization_data=img_iterative_sense.data,
regularization_weight=1.0,
)
img_us_regularized_iterative_sense = regularized_iterative_sense_reconstruction(kdata_undersampled)
Display the results
Besides the fully sampled image, we display two undersampled images: The first one is obtained by unregularized iterative SENSE, the second one using regularization.
Show plotting details
import matplotlib.pyplot as plt
import torch
def show_images(*images: torch.Tensor, titles: list[str] | None = None) -> None:
"""Plot images."""
n_images = len(images)
_, axes = plt.subplots(1, n_images, squeeze=False, figsize=(n_images * 3, 3))
for i in range(n_images):
axes[0][i].imshow(images[i], cmap='gray')
axes[0][i].axis('off')
if titles:
axes[0][i].set_title(titles[i])
plt.show()
show_images(
img_iterative_sense.rss()[0, 0],
img_us_iterative_sense.rss()[0, 0],
img_us_regularized_iterative_sense.rss()[0, 0],
titles=['Fully sampled', 'Iterative SENSE R=20', 'Regularized Iterative SENSE R=20'],
)

Behind the scenes
We now investigate the steps that are done in the regularized iterative SENSE reconstruction and
perform them manually. This also demonstrates how to use the mrpro operators and algorithms
to build your own reconstruction pipeline.
Set-up the density compensation operator \(W\) and acquisition model \(A\)
This is very similar to Iterative SENSE reconstruction of 2D golden angle radial data . For more details, please refer to that notebook.
dcf_operator = mrpro.data.DcfData.from_traj_voronoi(kdata_undersampled.traj).as_operator()
fourier_operator = mrpro.operators.FourierOp.from_kdata(kdata_undersampled)
csm_operator = csm.as_operator()
acquisition_operator = fourier_operator @ csm_operator
Calculate the right-hand-side of the linear system
We calculated \(b = A^H W y + l x_{reg}\).
Here, we make use of operator composition using @.
regularization_weight = 1.0
regularization_image = img_iterative_sense.data
(right_hand_side,) = (acquisition_operator.H @ dcf_operator)(kdata_undersampled.data)
right_hand_side = right_hand_side + regularization_weight * regularization_image
Set-up the linear self-adjoint operator \(H\)
We define \(H= A^H W A + l\). We use the IdentityOp and make
use of operator composition using @, addition using + and multiplication using *.
The resulting operator is a LinearOperator object.
operator = (
acquisition_operator.H @ dcf_operator @ acquisition_operator + mrpro.operators.IdentityOp() * regularization_weight
)
Run conjugate gradient
We solve the linear system \(Hx = b\) using the conjugate gradient method. Here, we use early stopping after 8 iterations. Instead, we could also use a tolerance to stop the iterations when the residual is small enough.
(img_manual,) = mrpro.algorithms.optimizers.cg(
operator, right_hand_side, initial_value=right_hand_side, max_iterations=8, tolerance=0.0
)
Display the reconstructed image
We can now compare our ‘manual’ reconstruction with the regularized iterative SENSE reconstruction
obtained using RegularizedIterativeSENSEReconstruction.
show_images(
img_us_regularized_iterative_sense.rss()[0, 0],
img_manual.abs()[0, 0, 0],
titles=['RegularizedIterativeSense', 'Manual'],
)
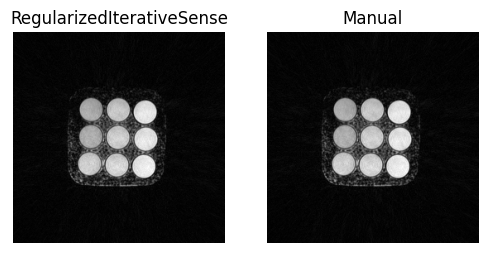
We can also check if the results are equal by comparing the actual image data. If the assert statement does not raise an exception, the results are equal.
torch.testing.assert_close(img_us_regularized_iterative_sense.data, img_manual)
Next steps
We are cheating here because we used the fully sampled image as a regularization. In real world applications we would not have that. One option is to apply a low-pass filter to the undersampled k-space data to try to reduce the streaking artifacts and use that as a regularization image. Try that and see if you can also improve the image quality compared to the unregularised images.