![]()
\(T_1\) mapping from a continuous Golden radial acquisition
# Imports
import shutil
import tempfile
from pathlib import Path
import matplotlib.pyplot as plt
import torch
import zenodo_get
from mpl_toolkits.axes_grid1 import make_axes_locatable # type: ignore [import-untyped]
from mrpro.algorithms.optimizers import adam
from mrpro.algorithms.reconstruction import DirectReconstruction
from mrpro.data import KData
from mrpro.data.traj_calculators import KTrajectoryIsmrmrd
from mrpro.operators import ConstraintsOp, MagnitudeOp
from mrpro.operators.functionals import MSE
from mrpro.operators.models import TransientSteadyStateWithPreparation
from mrpro.utils import split_idx
Overview
In this acquisition, a single inversion pulse is played out, followed by a continuous data acquisition with a a constant flip angle \(\alpha\). Data acquisition is carried out with a 2D Golden angle radial trajectory. The acquired data can be divided into different dynamic time frames, each corresponding to a different inversion time. A signal model can then be fitted to this data to obtain a \(T_1\) map.
More information can be found in: Kerkering KM, Schulz-Menger J, Schaeffter T, Kolbitsch C (2023). Motion-corrected model-based reconstruction for 2D myocardial \(T_1\) mapping. Magnetic Resonance in Medicine, 90(3):1086-1100, 10.1002/mrm.29699
The number of time frames and hence the number of radial lines per time frame, can in principle be chosen arbitrarily. However, a tradeoff between image quality (more radial lines per dynamic) and temporal resolution to accurately capture the signal behavior (fewer radial lines) needs to be found.
During data acquisition, the magnetization \(M_z(t)\) can be described by the signal model:
where the effective longitudinal relaxation time is given by:
and the steady-state magnetization is
The initial magnetization \(M_0^{init}\) after an inversion pulse is \(-M_0\). Nevertheless, commonly after an inversion pulse, a strong spoiler gradient is played out to remove any residual transversal magnetization due to imperfections of the inversion pulse. During the spoiler gradient, the magnetization recovers with \(T_1\). Commonly, the duration of this spoiler gradient \(\Delta t\) is between 10 to 20 ms. This leads to the initial magnetization
In this example, we are going to:
Reconstruct a single high quality image using all acquired radial lines.
Split the data into multiple dynamics and reconstruct these dynamic images
Define a signal model and a loss function to obtain the \(T_1\) maps
# Download raw data in ISMRMRD format from zenodo into a temporary directory
data_folder = Path(tempfile.mkdtemp())
dataset = '13207352'
zenodo_get.zenodo_get([dataset, '-r', 5, '-o', data_folder]) # r: retries
Title: 2D Dynamic Golden radial MR raw data
Keywords: MR raw data; T1 mapping; Golden radial
Publication date: 2024-08-03
DOI: 10.5281/zenodo.13207352
Total size: 4.7 MB
Link: https://zenodo.org/records/13207352/files/2D_GRad_map_t1.h5 size: 4.7 MB
Checksum is correct. (6235051bba0d04fe8df8fb6199da44d0)
All files have been downloaded.
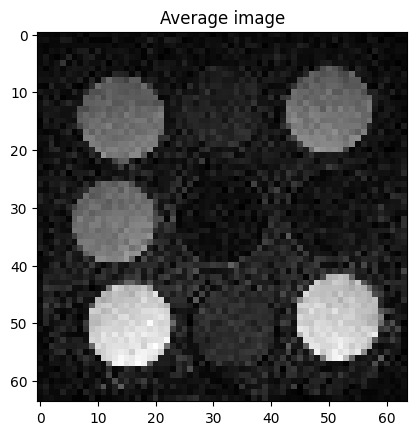
Reconstruct average image
Reconstruct one image as the average over all radial lines
# Read raw data and trajectory
kdata = KData.from_file(data_folder / '2D_GRad_map_t1.h5', KTrajectoryIsmrmrd())
# Perform the reconstruction
reconstruction = DirectReconstruction(kdata)
img_average = reconstruction(kdata)
# Visualize average image
plt.figure()
plt.imshow(img_average.rss()[0, 0, :, :], cmap='gray')
plt.title('Average image')
Text(0.5, 1.0, 'Average image')
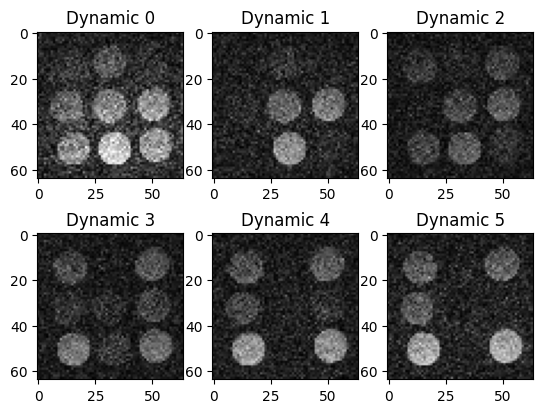
Split the data into dynamics and reconstruct dynamic images
We split the k-space data into different dynamics with 30 radial lines, each and no data overlap between the different dynamics. Then we again perform a simple direct reconstruction, where we use the same coil sensitivity map (which we estimated above) for each dynamic.
idx_dynamic = split_idx(torch.argsort(kdata.header.acq_info.acquisition_time_stamp[0, 0, :, 0]), 30, 0)
kdata_dynamic = kdata.split_k1_into_other(idx_dynamic, other_label='repetition')
# Perform the reconstruction
# Here we use the same coil sensitivity map for all dynamics
reconstruction_dynamic = DirectReconstruction(kdata_dynamic, csm=reconstruction.csm)
img_dynamic = reconstruction_dynamic(kdata_dynamic)
# Get absolute value of complex image and normalize the images
img_rss_dynamic = img_dynamic.rss()
img_rss_dynamic /= img_rss_dynamic.max()
# Visualize the first six dynamic images
fig, ax = plt.subplots(2, 3, squeeze=False)
for idx, cax in enumerate(ax.flatten()):
cax.imshow(img_rss_dynamic[idx, 0, :, :], cmap='gray', vmin=0, vmax=0.8)
cax.set_title(f'Dynamic {idx}')
Estimate \(T_1\) map
Signal model
We use a three parameter signal model \(q(M_0, T_1, \alpha)\).
As known input, the model needs information about the time \(t\) (sampling_time) in Eq. (1) since the inversion pulse.
This can be calculated from the acquisition_time_stamp. If we average the acquisition_time_stamp-values for each
dynamic image and subtract the first acquisition_time_stamp, we get the mean time since the inversion pulse for each
dynamic. Note: The time taken by the spoiler gradient is taken into consideration in the
TransientSteadyStateWithPreparation-model and does not have to be added here. Another important thing to note is
that the acquisition_time_stamp is not given in time units but in vendor-specific time stamp units. For the Siemens
data used here, one time stamp corresponds to 2.5 ms.
sampling_time = torch.mean(kdata_dynamic.header.acq_info.acquisition_time_stamp[:, 0, :, 0].to(torch.float32), dim=-1)
# Subtract time stamp of first radial line
sampling_time -= kdata_dynamic.header.acq_info.acquisition_time_stamp[0, 0, 0, 0]
# Convert to seconds
sampling_time *= 2.5 / 1000
We also need the repetition time between two RF-pulses. There is a parameter tr in the header, but this describes
the time “between the beginning of a pulse sequence and the beginning of the succeeding (essentially identical) pulse
sequence” (see DICOM Standard Browser). We have one
inversion pulse at the beginning, which is never repeated and hence tr is the duration of the entire scan.
Therefore, we have to use the parameter echo_spacing, which describes the time between two gradient echoes.
if kdata_dynamic.header.echo_spacing is None:
raise ValueError('Echo spacing needs to be defined.')
else:
repetition_time = kdata_dynamic.header.echo_spacing[0]
Finally, we have to specify the duration of the spoiler gradient. Unfortunately, we cannot get this information from the acquired data, but we have to know the value and set it by hand to 20 ms. Now we can define the signal model.
model_op = TransientSteadyStateWithPreparation(
sampling_time, repetition_time, m0_scaling_preparation=-1, delay_after_preparation=0.02
)
The reconstructed image data is complex-valued. We could fit a complex \(M_0\) to the data, but in this case it is more
robust to fit \(|q(M_0, T_1, \alpha)|\) to the magnitude of the image data. We therefore combine our model with a
MagnitudeOp.
magnitude_model_op = MagnitudeOp() @ model_op
Constraints
\(T_1\) and \(\alpha\) need to be positive. Based on the knowledge of the phantom, we can constrain \(T_1\) between 50 ms and 3 s. Further, we can constrain \(\alpha\). Although the effective flip angle can vary, it can only vary by a certain percentage relative to the nominal flip angle. Here, we chose a maximum deviation from the nominal flip angle of 50%.
if kdata_dynamic.header.fa is None:
raise ValueError('Nominal flip angle needs to be defined.')
else:
nominal_flip_angle = float(kdata_dynamic.header.fa[0])
constraints_op = ConstraintsOp(bounds=((None, None), (0.05, 3.0), (nominal_flip_angle * 0.5, nominal_flip_angle * 1.5)))
Loss function
As a loss function for the optimizer, we calculate the mean squared error between the image data \(x\) and our signal model \(q\).
mse_loss = MSE(img_rss_dynamic)
Now we can simply combine the loss function, the signal model and the constraints to solve
functional = mse_loss @ magnitude_model_op @ constraints_op
Carry out fit
# The shortest echo time is a good approximation for the equilibrium magnetization
m0_start = img_rss_dynamic[0, ...]
# 1 s a good starting value for T1
t1_start = torch.ones(m0_start.shape, dtype=torch.float32)
# and the nominal flip angle a good starting value for the actual flip angle
flip_angle_start = torch.ones(m0_start.shape, dtype=torch.float32) * kdata_dynamic.header.fa
# Hyperparameters for optimizer
max_iter = 500
lr = 1e-2
# Run optimization
params_result = adam(functional, [m0_start, t1_start, flip_angle_start], max_iter=max_iter, lr=lr)
params_result = constraints_op(*params_result)
m0, t1, flip_angle = (p.detach() for p in params_result)
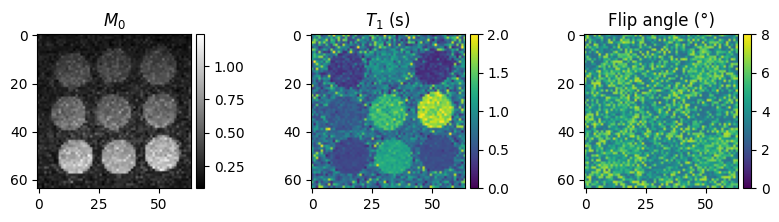
# Visualize parametric maps
fig, axes = plt.subplots(1, 3, figsize=(10, 2), squeeze=False)
colorbar_ax = [make_axes_locatable(ax).append_axes('right', size='5%', pad=0.05) for ax in axes[0, :]]
im = axes[0, 0].imshow(m0[0, ...].abs(), cmap='gray')
axes[0, 0].set_title('$M_0$')
fig.colorbar(im, cax=colorbar_ax[0])
im = axes[0, 1].imshow(t1[0, ...], vmin=0, vmax=2)
axes[0, 1].set_title('$T_1$ (s)')
fig.colorbar(im, cax=colorbar_ax[1])
im = axes[0, 2].imshow(flip_angle[0, ...] / torch.pi * 180, vmin=0, vmax=8)
axes[0, 2].set_title('Flip angle (°)')
fig.colorbar(im, cax=colorbar_ax[2])
<matplotlib.colorbar.Colorbar at 0x7f9aaa1952d0>
Next steps
The quality of the final \(T_1\) maps depends on the quality of the individual dynamic images. Using more advanced image reconstruction methods, we can improve the image quality and hence the quality of the maps.
Try to exchange DirectReconstruction above with IterativeSENSEReconstruction and compare the quality of the
\(T_1\) maps for different number of iterations (n_iterations).
# Clean-up by removing temporary directory
shutil.rmtree(data_folder)