![]()
Regularized Iterative SENSE Reconstruction of 2D golden angle radial data
Here we use the RegularizedIterativeSENSEReconstruction class to reconstruct images from ISMRMRD 2D radial data
# define zenodo URL of the example ismrmd data
zenodo_url = 'https://zenodo.org/records/10854057/files/'
fname = 'pulseq_radial_2D_402spokes_golden_angle_with_traj.h5'
# Download raw data
import tempfile
import requests
data_file = tempfile.NamedTemporaryFile(mode='wb', delete=False, suffix='.h5')
response = requests.get(zenodo_url + fname, timeout=30)
data_file.write(response.content)
data_file.flush()
Image reconstruction
We use the RegularizedIterativeSENSEReconstruction class to reconstruct images from 2D radial data. RegularizedIterativeSENSEReconstruction solves the following reconstruction problem:
Let’s assume we have obtained the k-space data \(y\) from an image \(x\) with an acquisition model (Fourier transforms, coil sensitivity maps…) \(A\) then we can formulate the forward problem as:
\( y = Ax + n \)
where \(n\) describes complex Gaussian noise. The image \(x\) can be obtained by minimizing the functionl \(F\)
\( F(x) = ||W^{\frac{1}{2}}(Ax - y)||_2^2 \)
where \(W^\frac{1}{2}\) is the square root of the density compensation function (which corresponds to a diagonal operator). Because this is an ill-posed problem, we can add a regularization term to stabilize the problem and obtain a solution with certain properties:
\( F(x) = ||W^{\frac{1}{2}}(Ax - y)||_2^2 + l||Bx - x_{reg}||_2^2\)
where \(l\) is the strength of the regularization, \(B\) is a linear operator and \(x_{reg}\) is a regularization image. With this functional \(F\) we obtain a solution which is close to \(x_{reg}\) and to the acquired data \(y\).
Setting the derivative of the functional \(F\) to zero and rearranging yields
\( (A^H W A + l B) x = A^H W y + l x_{reg}\)
which is a linear system \(Hx = b\) that needs to be solved for \(x\).
One important question of course is, what to use for \(x_{reg}\). For dynamic images (e.g. cine MRI) low-resolution dynamic images or high-quality static images have been proposed. In recent years, also the output of neural-networks has been used as an image regulariser.
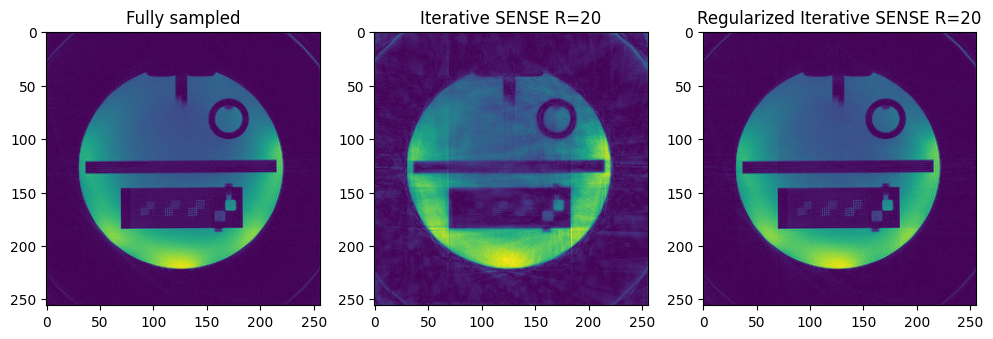
In this example we are going to use a high-quality image to regularize the reconstruction of an undersampled image. Both images are obtained from the same data acquisition (one using all the acquired data (\(x_{reg}\)) and one using only parts of it (\(x\))). This of course is an unrealistic case but it will allow us to study the effect of the regularization.
import mrpro
Read-in the raw data
from mrpro.data import KData
from mrpro.data.traj_calculators import KTrajectoryIsmrmrd
# Load in the Data and the trajectory from the ISMRMRD file
kdata = KData.from_file(data_file.name, KTrajectoryIsmrmrd())
kdata.header.recon_matrix.x = 256
kdata.header.recon_matrix.y = 256
Image \(x_{reg}\) from fully sampled data
from mrpro.algorithms.reconstruction import DirectReconstruction, IterativeSENSEReconstruction
from mrpro.data import CsmData
# Estimate coil maps
direct_reconstruction = DirectReconstruction(kdata, csm=None)
img_coilwise = direct_reconstruction(kdata)
csm = CsmData.from_idata_walsh(img_coilwise)
# Iterative SENSE reconstruction
iterative_sense_reconstruction = IterativeSENSEReconstruction(kdata, csm=csm, n_iterations=3)
img_iterative_sense = iterative_sense_reconstruction(kdata)
Image \(x\) from undersampled data
import torch
# Data undersampling, i.e. take only the first 20 radial lines
idx_us = torch.arange(0, 20)[None, :]
kdata_us = kdata.split_k1_into_other(idx_us, other_label='repetition')
# Iterativ SENSE reconstruction
iterative_sense_reconstruction = IterativeSENSEReconstruction(kdata_us, csm=csm, n_iterations=6)
img_us_iterative_sense = iterative_sense_reconstruction(kdata_us)
# Regularized iterativ SENSE reconstruction
from mrpro.algorithms.reconstruction import RegularizedIterativeSENSEReconstruction
regularization_weight = 1.0
n_iterations = 6
regularized_iterative_sense_reconstruction = RegularizedIterativeSENSEReconstruction(
kdata_us,
csm=csm,
n_iterations=n_iterations,
regularization_data=img_iterative_sense.data,
regularization_weight=regularization_weight,
)
img_us_regularized_iterative_sense = regularized_iterative_sense_reconstruction(kdata_us)
import matplotlib.pyplot as plt
vis_im = [img_iterative_sense.rss(), img_us_iterative_sense.rss(), img_us_regularized_iterative_sense.rss()]
vis_title = ['Fully sampled', 'Iterative SENSE R=20', 'Regularized Iterative SENSE R=20']
fig, ax = plt.subplots(1, 3, squeeze=False, figsize=(12, 4))
for ind in range(3):
ax[0, ind].imshow(vis_im[ind][0, 0, ...])
ax[0, ind].set_title(vis_title[ind])
Behind the scenes
Set-up the density compensation operator \(W\) and acquisition model \(A\)
This is very similar to the iterative SENSE reconstruction. For more detail please look at the iterative_sense_reconstruction notebook.
dcf_operator = mrpro.data.DcfData.from_traj_voronoi(kdata_us.traj).as_operator()
fourier_operator = mrpro.operators.FourierOp.from_kdata(kdata_us)
csm_operator = csm.as_operator()
acquisition_operator = fourier_operator @ csm_operator
Calculate the right-hand-side of the linear system \(b = A^H W y + l x_{reg}\)
right_hand_side = (
acquisition_operator.H(dcf_operator(kdata_us.data)[0])[0] + regularization_weight * img_iterative_sense.data
)
Set-up the linear self-adjoint operator \(H = A^H W A + l\)
from mrpro.operators import IdentityOp
operator = acquisition_operator.H @ dcf_operator @ acquisition_operator + IdentityOp() * torch.as_tensor(
regularization_weight
)
Run conjugate gradient
img_manual = mrpro.algorithms.optimizers.cg(
operator, right_hand_side, initial_value=right_hand_side, max_iterations=n_iterations, tolerance=0.0
)
# Display the reconstructed image
vis_im = [img_us_regularized_iterative_sense.rss(), img_manual.abs()[:, 0, ...]]
vis_title = ['Regularized Iterative SENSE R=20', '"Manual" Regularized Iterative SENSE R=20']
fig, ax = plt.subplots(1, 2, squeeze=False, figsize=(8, 4))
for ind in range(2):
ax[0, ind].imshow(vis_im[ind][0, 0, ...])
ax[0, ind].set_title(vis_title[ind])
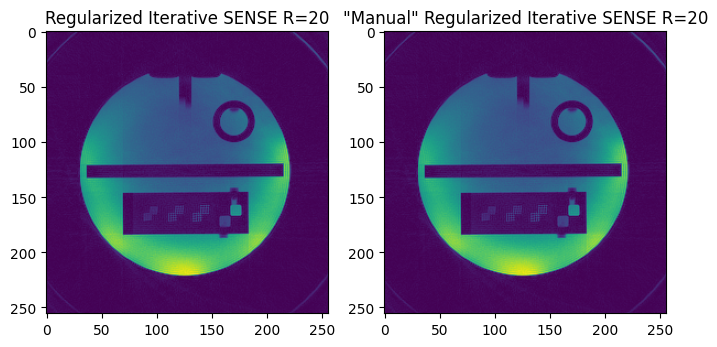
Check for equal results
The two versions should result in the same image data.
# If the assert statement did not raise an exception, the results are equal.
assert torch.allclose(img_us_regularized_iterative_sense.data, img_manual)
Next steps
Play around with the regularization_weight to see how it effects the final image quality.
Of course we are cheating here because we used the fully sampled image as a regularization. In real world applications we would not have that. One option is to apply a low-pass filter to the undersampled k-space data to try to reduce the streaking artifacts and use that as a regularization image. Try that and see if you can also improve the image quality compared to the unregularised images.